
Research >> Micro/nano microrobotics >> Magnetically-driven microrobot
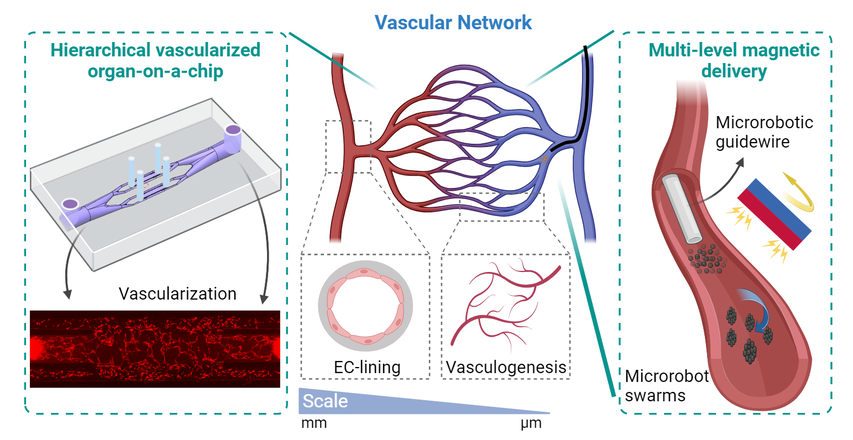
In this study, we have introduced a multi-level delivery strategy designed for robust and highly efficient delivery of microrobots and validated within a hierarchical vascularized organ-on-a-chip platform. Our approach combines the coordinated manipulation of a tethered microrobotic guidewire with untethered swimming microrobots, significantly enhancing the efficiency of targeted delivery within complex biological fluidic environments over extended distances. In parallel, we have engineered a hierarchical vascularized model by integrating vasculogenesis and EC-lining techniques on a single microfluidic chip, creating a comprehensive testing platform for multi-scale microrobots. This vascularized organ-on-a-chip platform demonstrates its versatility in a wide range of microrobotic applications by faithfully replicating the physiological vascular environments in-vivo, thus serving as an advanced testing platform capable of imaging, control, and biocompatibility assessment.
Selected Publications
1. Kangyi Lu, Chenyang Zhou, Zhangjie Li, Yijun Liu, Feifan Wang, Lian Xuan and Xiaolin Wang*, Multi-level magnetic microrobots delivery strategy within a hierarchical vascularized organ-on-a-chip, Lab on a Chip, 2024, 24, 446-459..
1. Kangyi Lu, Chenyang Zhou, Zhangjie Li, Yijun Liu, Feifan Wang, Lian Xuan and Xiaolin Wang*, Multi-level magnetic microrobots delivery strategy within a hierarchical vascularized organ-on-a-chip, Lab on a Chip, 2024, 24, 446-459..