2. Bio-micro-robotics for cell manipulation
1). Enhanced cell sorting and manipulation with combined optical tweezer and microfluidic chip technologies
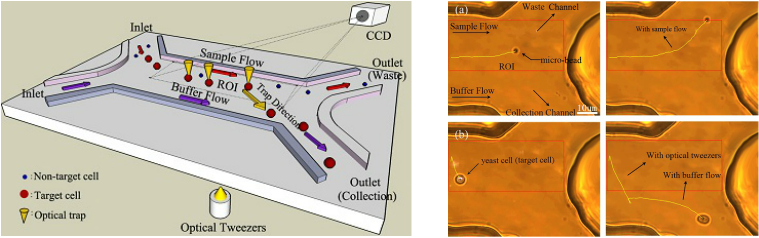
Sorting (or isolation) and manipulation of rare cells with high recovery rate and purity are of critical importance to a wide range of physiological applications. In this research, we present a generic single cell manipulation tool that integrates optical tweezers and microfluidic chip technologies for handling small cell population sorting with high accuracy. The laminar flow nature of microfluidics enables the targeted cells to be focused on a desired area for cell isolation. To recognize the target cells, we develop an image processing methodology with a recognition capability of multiple features, e.g., cell size and fluorescence label. The target cells can be moved precisely by optical tweezers to the desired destination in a noninvasive manner. The unique advantages of this sorter are its high recovery rate and purity in small cell population sorting. The design is based on dynamic fluid and dynamic light pattern, in which single as well as multiple laser traps are employed for cell transportation, and a recognition capability of multiple cell features. Experiments of sorting yeast cells and human embryonic stem cells are performed to demonstrate the effectiveness of the proposed cell sorting approach.
2). Automated parallel cell isolation and deposition using microwell array and optical tweezers
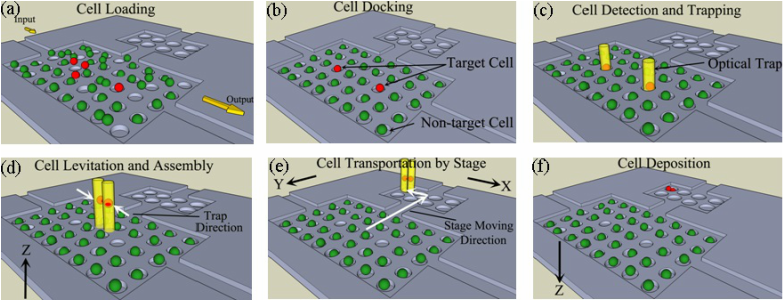
Isolation and deposition of specific live cells with the high spatio-temporal resolution from the heterogeneous mixtures are of critical importance to a wide range of biomedical applications. In this research, we report a robot-assisted cell manipulation tool with optical tweezers based on a uniquely designed microwell array. The whole automatic manipulation includes the target cell recognition, isolation, transportation and deposition. The microwell array is designed based on microfluidics technology, which allows the passive hydrodynamic docking of cells. Image processing technique is used to recognize the target cells based on intrinsic features or extrinsic features. After recognition, the target cells can be levitated from the microwell, and then assembled by multiple optical traps in parallel. The optically trapped target cells are then transported and deposited to the desired location precisely, which is beneficial to integrate the other on-chip functionalities for further analysis or manipulation without removing the cells from the chip.
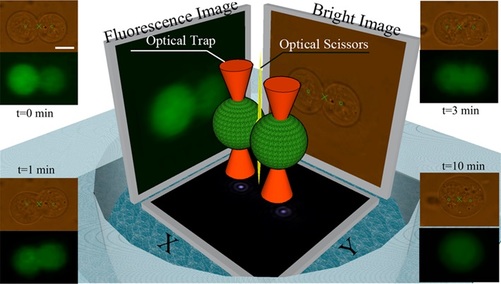
3). Automated laser-induced cell fusion with optical tweezers and optical scissors
Engineering induced cell fusion is becoming a promising tool in novel therapeutic studies for treating various diseases. Themajority of current in vitro cell fusion methods are based on random cell pairing with loose contact, which also needs large amounts of cells. In this research, we present a robotically controlled laser-induced cell fusion approach based on the microwell array, which exhibits advantages of high selectivity and controllability. Optical tweezers and optical scissors are employed to achieve cell pairing and fusion, respectively. The specific cells are characterized and preselected with an on-chip isolation method prior to pairing. The paired cells are then transported, deposited, fused, and released at a predefined locationwith high spatiotemporal resolution.